




大学発の「視触覚」技術の実用化を通じてロボットや機械の適用範囲を広げることで社会課題の解決を目指すベンチャー企業FingerVision(東京・本郷三丁目、濃野友紀社長)と吉野家は、牛丼店舗の食器洗浄工程をロボットで自動化・省人化する共同開発契約を締結した。
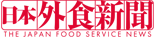
約1200店舗ある「吉野家」では現状、使用後の汚れた食器を従業員が手で浸漬水に浸した上で1つひとつ取り出し、洗浄機用のラックへ載せ替え食器洗浄機で洗浄している。今回の共同開発では、この汚れた水の中から多種多様な種類の汚れた食器をとりだし、ラックに載せ替える工程をアームロボットで自動化することを目指す。
現在の人による作業
「吉野家」では、1人の従業員が接客から調理、配膳、片付けまで複数の業務を担っており、その中でも食器の「片付け」工程は、付加価値に直接的に繋がりにくく、手や腕の汚れを伴い手荒れや怪我のリスクも懸念されるため、自動化へのニーズが高い工程だった。一方、既成の全自動食洗機は大型が多く、店舗面積やレイアウト、費用面などから複数店舗に水平展開することは難しかった。

視触覚センサから取得した画像情報に基づいて汚水中の皿をハンドリングするための各種情報を取得
FingerVisionは、この洗浄工程を自動化するロボット実装にあたり、技術的に難易度が高いポイントとして①食器の種類が多い②油汚れが多いため滑りやすく1度掴んだ後に落としやすい③浸漬槽に沈んでいる食器を浸漬槽の外側から認識することが極めて困難――を挙げる。
これに対し、FingerVisionの視触覚ロボットハンドはそれほど場所を取らずに、さまざまな種類の食器に対する汎用的なハンドリングと「滑り検知」による落下の回避を両立させつつ、水の中でも食器の種類や、位置、向き、距離・深さなどを推定することで、ロボットの自律制御の幅を格段に高めることに成功。東京のJR神田駅店で実証実験したところ、ピークタイム(11~14時)の従業員による食器の載せ替え動作に要する時間を523秒から289秒に短縮できた。ここから、標準店舗で1日中稼働させた場合、人時生産性は101.7%向上するとの結果を得た。
両社は今後、実店舗での実証を重ねた上で自動化の範囲を広げ、さらなる生産性の向上と労働環境改善を目指すとしている。

